近年、日本でも普及してきたPET-CTおよびSPECT-CT用のフュージョンを含めた優秀なImageJプラグインがボストンにあるベスイスラエル病院で開発され、紹介されています。
DICOMビューワとしても完成度が高く、医師、技師にとって非常に使いやすいGUIになっています。研究や教育に大いに役立つツールなので、今回はPET-CT Viewerをご紹介します。
PET-CT Viewerプラグインの準備
PET-CT Viewerはベスイスラエル病院の核医学のチーム( Nuclear Medicine at Beth Israel Deaconess Medical Center, Boston MA.)によって作成されたImageJのプラグインです。
その動作環境はFijiが推奨されているようです。以降はFijiで動作を紹介します。
Fijiをインストールしていない方は第51回を参照して、インストールしてみてください。
Fijiが用意できたら、PET-CT Viewerのソースコードリポジトリから、以下の各種ファイルをダウンロードします。まずは、ユーザーマニュアルをダウンロードしましょう。
(http://sourceforge.net/projects/bifijiplugins/files/)
- Beth Israel PluginQuick User Guide
- Pet_Ct_Viewer.jar
メインのJarファイルです。Help - Read_CD.jarPET画像が含まれる外部メディア読み込み時に利用できるパッケージです。 Help
- Gastric_Emptying.jar計測や便利ツール群です。
- Read_BI_Studies.jarBeth Israel miniPacsの読み書き用パッケージです。 Help セットアップ用のcreateBIdatabase.jar が別に必要です。これはデフォルトでは含まれていません。 Help
- Read_ClearCanvas_Studies.jarClear Canvasのスタディデータを読み書きするためのパッケージです。 Help
- StartupMacros.ijmFijiがスタートすると同時にPET-CT Viewerが起動するマクロです。
- libPET-CT Viewer起動に必要なdcm4cheなどのライブラリ群です。
一つは、ユーザーマニュアル通り、FijiのHelpからプラグインを含めてアップデートすることです。もう一つは、いつも通り、上記パッケージ群を1つのフォルダにまとめて、FijiのPluginsフォルダにコピーします(Macの場合は、FinderでFijiの実行ファイルのディレクトリを開いて、Fijiの実行ファイルを右クリックして、パッケージの内容を表示)。
早速、ImageJプラグイン同様に、PET-CT Viewerを起動してみます。

(起動画面)
あらかじめ読み込んでおいたCTとPETの2つのスタック(複数シリーズでもOK)があれば、自動的にシリーズがPET-CTウィンドウ画面にリスティングされます。
PET-CT Viewerの機能について
まず、サンプルデータを表示してみます。
先に、PET-CTのPET画像とCT画像をそれぞれスタック画像として表示しておき、PET-CT Viewerを起動し、リストの中のフュージョンしたい2つのシリーズをチェックして、OKします。

(スタック画像のリスト)
その後、ビューワが起動し、PET画像のMIP画像が回転し始めます。

(表示)
このとき、すでに2つのシリーズはフュージョンされており、拡大、縮小、ウィンド二ング、ページングを同期して、簡単に観察することができます。動画表示を停止するときは、MIPボタンを押すと停止します。再度見るときは、もう一度MIPマークを押して、MIPマーク隣の>>マークでスタートストップを調整します。
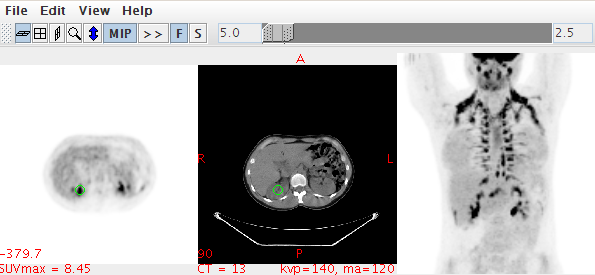
その他、FボタンとSボタンはそれぞれ正面と側面のリセット表示になっています。マウスカーソルを画像上に持っていけば、SUVbw(Max)(以下、SUVと略す)とHU値が表示されます。もし、DICOMタグに綺麗に放射線医薬品情報シーケンスが付随していない場合は、MaxCountが表示されます。

(PET画像上にSUVbwmaxが表示されている)

(SUVが計算されておらず、PET画像上にMaxCountのみ表示されている)
画像読み込み時に、SUVが正しく計算できないときは、体重、(身長)、投与開始時刻、投与量、半減期、撮像開始時刻(SUV算出に必要な変数)のポップアップウィンドウが出現します。このポップアップは、正しい値がない変数を示すためのものです。このウィンドウ上で編集しなおしても計算に反映はされません。読み込みDICOMデータのタグを編集する必要があります。
身長も入力できるので、Lean body mass SUV(SUL)も算出できるようです。Edit>Optionメニューから、Use SULをチェックして設定します。詳細はこちらを。(http://sourceforge.net/p/bifijiplugins/wiki/Options/)




また、次の図は、CTとPETそれぞれを自在なウィンドウとカラー(HotIronに変更)で3直行断面を同時表示している例です。Editメニューのツールバーも機能が豊富です。次の図では、ツールバーを表示しています。計測を行った位置のブックマークやテキスト入力、アローの入力、長さの計測、SUV計測などの機能が揃っています。

CT表示では、Cross sectionの緑のラインが邪魔なときは、ラインの長さを調整できます。


それぞれのモダリティ(PET,CT,MIP)での表示画面で、右クリックすると、ポップアップメニューが開きますが、内容はそれぞれ異なります。
PET
Auto level:SUV値が5に修正されるような条件に自動で濃淡レベルを調整
Brain:SUV値が10に修正されるような条件に自動で濃淡レベルを調整
Fused:フュージョン画像を表示する。MIPがアクティブでないと使えない。
Corrected: 吸収補正画像を表示(デフォルト)
Uncorrected:吸収補正なしのPETデータを表示
3PET:新しいウィンドウで、3軸表示。
Inverse:反転
Gray scale:カラースケールをグレースケールで表示
Blues:ブルータイプカラースケール
Hot iron:イエローレッドカラースケール表示
CT/MRI
Abdomen-Chest:HU値セット
3CT:3軸表示
(MRIの場合は、CTをMRIに置きかえる)
MIP
PET gray scale:PETグレースケールを調整。
この他、SUVを計測するための円形VOIのサイジングなども、オプション設定で可能になっています。

また、今回はご紹介していませんが、MRIのデータも取得している場合は、Sync MRI data機能を使って、マニュアルでフュージョン位置合わせも可能です。
位置合わせはリジッドマッチングなども今後組み込まれるといいですね。

また、Brown Adipose Tissueの測定のためのツールなど、ホットトピックなテーマのツールのインターフェースも組み込まれています。※詳細な使い方を検証していますので、また更新します。

(ユーザーガイドより引用)
今回は、Fijiを用いたPET/CTフュージョンビューワの説明を行いました。
フュージョンまでできる市販のDICOMビューワは増えていますが、フリーでは数少ないので、このツールは研究や教育に十分利用できると考えられます。
このツールがより進化して、位置合わせの方法や種々のSUV算出や調整も可能になるといいですね。
次回も、ImageJの最新の話題と実践的な使い方について説明します。
参考文献
- Paul E. Kinahan, PhD et al:PET/CT Standardized Uptake Values (SUVs) in Clinical Practice and Assessing Response to Therapy.Semin Ultrasound CT MR. 2010 December ; 31(6): 496–505.
- http://www.med.harvard.edu/JPNM/ij/plugins/TPcollection.html
参考記事:「山本修司:ImageJで学ぶ実践医用・バイオ画像処理.INNERVISION(25・8) 2010, p108-110」
























